01
計画
業務が効率的かつ円滑に実施できるよう、事前に現地調査を行います。探査車両(GMS3)は走行可能か、空洞発生要因に推測される構造物がないかなどをチェックし、業務計画書をクライアントへ提出します。
近年、全国各地で道路の陥没事故が相次いでおり、その多くは老朽化した排水管の破損や地下構造物の劣化が原因とされています。今後も埋設インフラの老朽化がさらに進むことで、こうした事故の増加が懸念されています。
この深刻な課題に対して、当社では、高性能な地中レーダを搭載した『路面下空洞探査車(GMS3)』を活用し、道路下に形成された空洞を非破壊かつ高精度に検知することで、陥没事故の未然防止に取り組んでおります。
GMS3による調査により、目視では把握できない地中に潜むリスクを「見える化」し、安全・安心な道路インフラの維持管理を支援します。
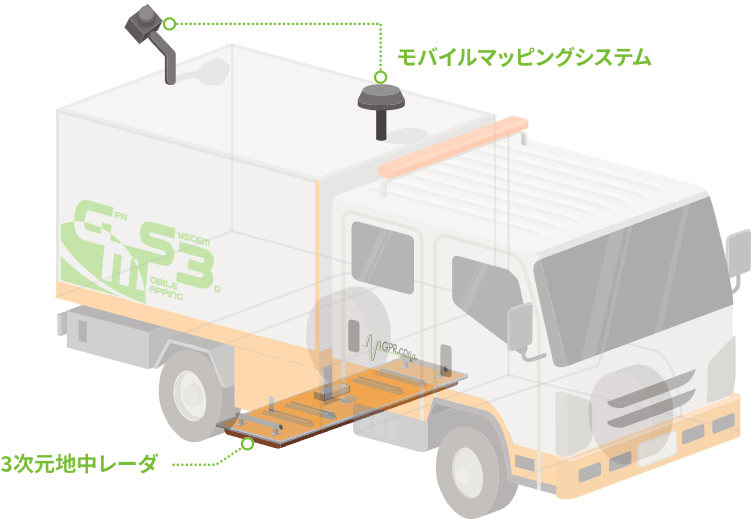
マルチチャンネルアンテナから電磁波を送受信し、地下約2mまでの空洞・異常信号・埋設物の位置情報をCTスキャンのように3次元で検出します。従来技術と比較して、広範囲の調査を短時間で実施できるため、効率的かつ高精度な診断を実現します。
全周囲カメラと位置情報を組み合わせることで、公共測量作業規程の定める1/500精度の3次元移動計測が可能です。走行しながら道路周辺の地上情報を正確かつ効率的に取得でき、現地作業の負担軽減や調査の迅速化に貢献します。
地中レーダとモバイルマッピングシステムで取得したデータはGPS時刻で完全に同期されます。これにより、地下と地上の3次元情報を一元管理でき、高精度な3次元データベースの構築が可能となります。また、専用ビューアソフトや各種GISソフトとの円滑な連携も可能です。